#include <IncrementalSVD.h>
|
| virtual void | buildInitialSVD (double *u, double time)=0 |
| | Constructs the first SVD. More...
|
| |
| virtual bool | buildIncrementalSVD (double *u, bool add_without_increase=false) |
| | Adds the new sampled the state vector, u, to the system. More...
|
| |
|
virtual void | computeBasis ()=0 |
| | Computes the current basis vectors.
|
| |
| void | constructQ (double *&Q, const Vector *l, double k) |
| | Construct the matrix Q whose SVD is needed. More...
|
| |
| bool | svd (double *A, Matrix *&U, Matrix *&S, Matrix *&V) |
| | Given a matrix, A, returns 2 of the 3 components of its singular value decomposition. The right singular vectors are not needed and therefore not returned. More...
|
| |
| virtual void | addLinearlyDependentSample (const Matrix *A, const Matrix *W, const Matrix *sigma)=0 |
| | Add a linearly dependent sample to the SVD. More...
|
| |
| virtual void | addNewSample (const Vector *j, const Matrix *A, const Matrix *W, Matrix *sigma)=0 |
| | Add a new, unique sample to the SVD. More...
|
| |
| int | numSamples () |
| | The number of samples stored. More...
|
| |
| double | checkOrthogonality (const Matrix *m) |
| | Computes and returns the orthogonality of m. More...
|
| |
| void | reOrthogonalize (Matrix *m) |
| | Reorthogonalizes m. More...
|
| |
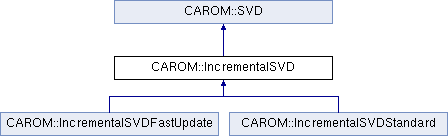
Abstract class IncrementalSVD defines the internal API of the incremental SVD algorithm.
| CAROM::IncrementalSVD::IncrementalSVD |
( |
Options |
options, |
|
|
const std::string & |
basis_file_name |
|
) |
| |
Constructor.
- Parameters
-
| [in] | options | The struct containing the options for this abstract SVD class. |
| [in] | basis_file_name | The base part of the name of the file containing the basis vectors. Each process will append its process ID to this base name. |
- See Also
- Options
| virtual void CAROM::IncrementalSVD::addLinearlyDependentSample |
( |
const Matrix * |
A, |
|
|
const Matrix * |
W, |
|
|
const Matrix * |
sigma |
|
) |
| |
|
protectedpure virtual |
Add a linearly dependent sample to the SVD.
- Precondition
- A != 0
-
sigma != 0
- Parameters
-
| [in] | A | The left singular vectors. |
| [in] | W | The right singular vectors. |
| [in] | sigma | The singular values. |
| virtual void CAROM::IncrementalSVD::addNewSample |
( |
const Vector * |
j, |
|
|
const Matrix * |
A, |
|
|
const Matrix * |
W, |
|
|
Matrix * |
sigma |
|
) |
| |
|
protectedpure virtual |
Add a new, unique sample to the SVD.
- Precondition
- j != 0
-
A != 0
-
sigma != 0
- Parameters
-
| [in] | j | The new column of d_U. |
| [in] | A | The left singular vectors. |
| [in] | W | The right singular vectors. |
| [in] | sigma | The singular values. |
| virtual bool CAROM::IncrementalSVD::buildIncrementalSVD |
( |
double * |
u, |
|
|
bool |
add_without_increase = false |
|
) |
| |
|
protectedvirtual |
Adds the new sampled the state vector, u, to the system.
- Precondition
- u != 0
- Parameters
-
| [in] | u | The new state. |
| [in] | add_without_increase | If true, addLinearlyDependent is invoked. |
- Returns
- True if building the incremental SVD was successful.
| virtual void CAROM::IncrementalSVD::buildInitialSVD |
( |
double * |
u, |
|
|
double |
time |
|
) |
| |
|
protectedpure virtual |
Constructs the first SVD.
- Precondition
- u != 0
-
time >= 0.0
- Parameters
-
| [in] | u | The first state. |
| [in] | time | The simulation time for the first state. |
| double CAROM::IncrementalSVD::checkOrthogonality |
( |
const Matrix * |
m | ) |
|
|
protected |
Computes and returns the orthogonality of m.
- Precondition
- m != 0
- Parameters
-
| [in] | m | The matrix to check. |
- Returns
- The orthogonality of m.
| void CAROM::IncrementalSVD::constructQ |
( |
double *& |
Q, |
|
|
const Vector * |
l, |
|
|
double |
k |
|
) |
| |
|
protected |
Construct the matrix Q whose SVD is needed.
- Precondition
- l != 0
-
l.dim() == numSamples()
- Parameters
-
| [out] | Q | The matrix to be constructed. [d_S,l; 0,k] |
| [in] | l | The last column of Q. |
| [in] | k | The lower right element of Q. |
| virtual const Vector* CAROM::IncrementalSVD::getSingularValues |
( |
| ) |
|
|
virtual |
Returns the singular values for the current time interval.
- Returns
- The singular values for the current time interval.
Implements CAROM::SVD.
| virtual const Matrix* CAROM::IncrementalSVD::getSnapshotMatrix |
( |
| ) |
|
|
virtual |
Returns the snapshot matrix for the current time interval.
- Returns
- The snapshot matrix for the current time interval.
Implements CAROM::SVD.
| virtual const Matrix* CAROM::IncrementalSVD::getSpatialBasis |
( |
| ) |
|
|
virtual |
Returns the basis vectors for the current time interval as a Matrix.
- Returns
- The basis vectors for the current time interval.
Implements CAROM::SVD.
| virtual const Matrix* CAROM::IncrementalSVD::getTemporalBasis |
( |
| ) |
|
|
virtual |
Returns the temporal basis vectors for the current time interval as a Matrix.
- Returns
- The temporal basis vectors for the current time interval.
Implements CAROM::SVD.
| int CAROM::IncrementalSVD::numSamples |
( |
| ) |
|
|
inlineprotected |
The number of samples stored.
- Returns
- The number of samples stored.
| void CAROM::IncrementalSVD::reOrthogonalize |
( |
Matrix * |
m | ) |
|
|
protected |
Reorthogonalizes m.
- Precondition
- m != 0
- Parameters
-
| [in,out] | m | The matrix to reorthogonalize. |
Given a matrix, A, returns 2 of the 3 components of its singular value decomposition. The right singular vectors are not needed and therefore not returned.
- Precondition
- A != 0
- Parameters
-
| [in] | A | The matrix whose SVD is needed. |
| [out] | U | The left singular vectors of A. |
| [out] | S | The singular values of A. |
| [out] | V | The right singular vectors of A. |
- Returns
- True if the SVD succeeded.
| virtual bool CAROM::IncrementalSVD::takeSample |
( |
double * |
u_in, |
|
|
double |
time, |
|
|
bool |
add_without_increase = false |
|
) |
| |
|
virtual |
Sample new state, u_in, at the given time.
- Precondition
- u_in != 0
-
time >= 0.0
- Parameters
-
| [in] | u_in | The state at the specified time. |
| [in] | time | The simulation time for the state. |
| [in] | add_without_increase | If true, addLinearlyDependent is invoked. |
- Returns
- True if the sampling was successful.
Implements CAROM::SVD.
The documentation for this class was generated from the following file:
 Public Member Functions inherited from CAROM::SVD
Public Member Functions inherited from CAROM::SVD 1.8.5
1.8.5

